关于论文 Dynamic SLAM: The Need For Speed (ICRA, 2020) 的阅读总结。
Dynamic SLAM: The Need For Speed
论文情况
1 Introduction
大量 SLAM 问题基于静态世界假设,这限制了现存算法在包含动态物体的真实世界的精确度。
DL 的发展提供了几乎实时目标检测和分割的可靠算法:
- 将 DL 融入几何 SLAM,除了检测和分割,还需要 3D 模型是可用的,或者前段显示提供对象的位姿。对 3D 模型的精确度要求限制了潜在的应用领域。
- 同时,多目标跟踪和 3D 位姿仍然是一大挑战。需要一种算法,可以利用现有 DL 强大的检测和分割能力,而不依赖额外的位姿估计或运动模型先验。
本文提出来一个无模型、目标感知的基于点的动态 SLAM 模型:
- 利用基于图像的语义信息进行机器人定位、绘制静态结构、估计动态物体的完整 SE(3) 位姿变换、构建世界的动态表示。
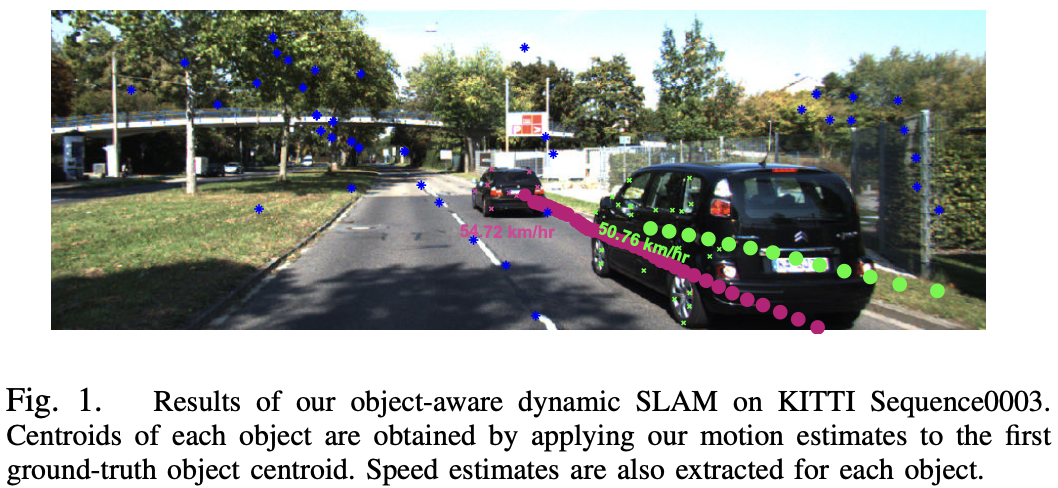
- 利用物体的刚体运动来提取场景中物体的速度信息,如 Fig.1。
本文关键创新:
- 一种新颖的姿态变化表示,用于对给定刚体上点集合的运动进行建模,并将模型集成到 SLAM 优化框架。只要对象的语义检测和分割可以被跟踪,生成的模型与对象的底层 3D 模型无关。
- 本文是第一个能够估计相机位姿、静态和动态结构、场景中每个刚性物体的完整 SE(3) 位姿变化的工作。
2 Accounting for Dynamic Obects in SLAM
问题描述:SLAM 下机器人的感知范围内存在相对较大的动态刚体。SLAM 前端能在不同时刻识别并提取同一物体上的点,这些点共享在一个潜在运动约束上,用于提高 SLAM 性能。
动态物体 SLAM:
- 使用因子图,获取静态和动态 3D 结构、位姿变换约束。
考虑高斯噪声,问题变为非线性最小二乘问题:
- 机器人位姿 xxx={x0,...,xnx},xk∈SE(3),k∈{0,...,nx},其中 nx 为时间步数量;
- 不同时间步环境中的 3D 点特征 lll={l01,...,lnxnl},lki∈R3,其中i∈{1,...,nl} 为 landmark 的唯一索引,nl 为检测到的 landmark 的总数。lll=lslsls∪ldldld 包含静态 landmark 集合 lslsls 和动态 landmark 集合 ldldld。
- 一个运动目标在不同时间的同一个点用不同的变量表示,即 lk−1i 和 lki,即不同时间步的第 i 个特征点。
2.2 Motion Model of a Point on a Rigid Body
2.2.1 符号设定
符号:
-
设 {0} 为参考坐标系(世界坐标系),{L} 为运动刚体的坐标系。
-
0Lk∈SE(3) 为刚体相对坐标系 {0} 的位姿。
-
对于物体上的特征点,Lli∈R3 表示点在该物体坐标系的坐标。记 0lki 为同一个特征点在时间步 k 相对于坐标系 {0} 的坐标。
-
注意,对运动中对刚体来说,Lli 是常量,0Lk,0lki 则是随时间变化的。存在关系:
Llˉi=0Lk−10lˉki(1)
其中 lˉ 为齐次坐标。
2.2.2 坐标系变化之间的关系
物体 L 从 k−1 到 k 到相对变换表示为 k−1Lk−1Hk∈SE(3),成为 body-fixed 坐标位姿系变换,且存在关系:
k−1Lk−1Hk=0Lk−1−10Lk(2)
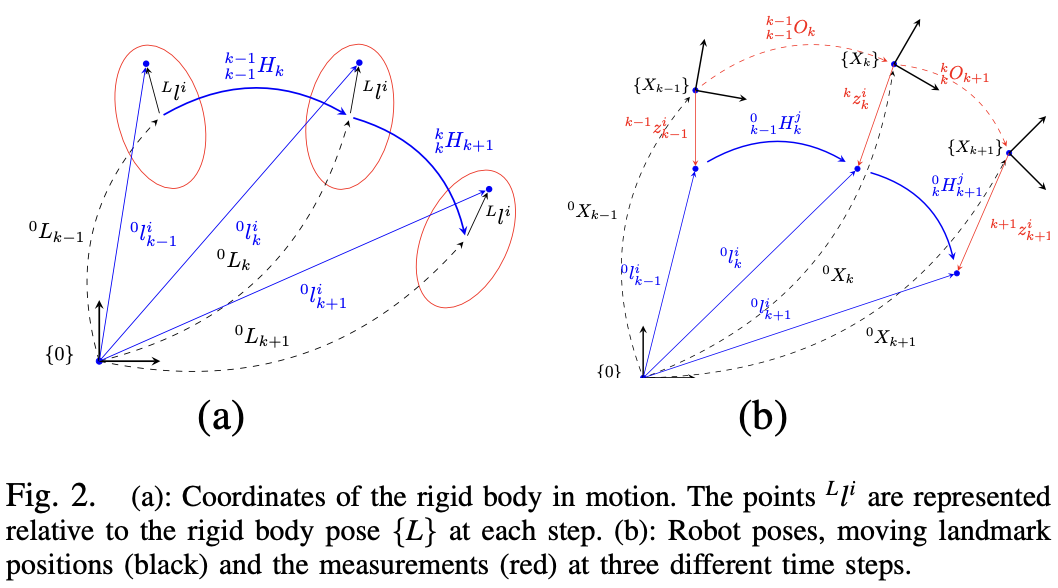
Fig.2a 表示了三个连续位姿的上述关系:
由 (2) 可以得到心得刚体坐标可以写为增量形式:
0Lk=0Lk−1k−1Lk−1Hk(3)
考虑物体坐标系 {L} 中的点 Lli,联合 (1) (3) 可以得到:
0lˉki=0Lk−1k−1Lk−1Hk0Lk−1−10lˉk−1i(4)
由 (4) 可以得到 k−10Hk=0Lk−1k−1Lk−1Hk0Lk−1−1∈SE(3),表示了位姿变换的坐标系变化,并说明了 (2) 中 body-fixed 坐标系的坐标系变化与参考坐标系的坐标系变化之间的关系。从而有:
0lˉki=k−10Hk0lˉk−1i(5)
(5) 是本文方法的关键点,其限制了对物体位姿 0Lk 估计的必要性,允许直接使用参考坐标系中的点 lˉki。
2.2.3 线速度提取
给定刚体在惯性坐标系下的位姿变换 k−10Hk,刚体的线速度向量为:
v=k−10tk−(I3−k−10Rk)ck−1(6)
其中 k−10Rk∈SO(3) 和 k−10tk∈R3 表示刚体位姿变换 k−10Hk 的旋转和平移,I3 为单位矩阵,ck−1 为刚体在 k−1 时的质心坐标。
由于算法设计,并没有直接获取物体的质心,而是近似为物体上检测到的特征点的 3D 质心。(6) 的详细推导参考 [1]。
2.3 Motion Factors in Dynamic SLAM
为了估计了相机位姿、静态和动态结构、动态结构的运动,运动因子和从机器人本体传感器获得的里程数,以及 landmark 观测被联合优化:
θ∗θθθ=θargmin{k=1∑mkρh((h(xk,lki)−zki)⊤Σwk−1(h(xk,lki)−zki))+i=1∑miρh((f(xk−1,xk)−ok)⊤Σvk−1(f(xk−1,xk)−ok))+i,j∑msρh((g(lk−1i,lki,k−10Hkj))⊤Σq−1(g(lk−1i,lki,k−10Hkj))}=xxx∪lll∪HHH
HHH 表示描述物体运动的变量集合。
其中(参考 Fig.2b 中红线):
-
ρh 为 Huber 函数;
-
h(xk,lki) 为 3D 点测量模型,Σwk 为点测量协方差,zzz={z1,...,zmk},zk∈R3 表示所有的时间步下的 mk 个 3D 点测量;
-
f(xk−1,xk) 为惯导模型,Σvk 为惯导协方差,ooo={o1,...,omi} 表示 mi 个惯导测量;
-
g(lk−1i,lki,k−10Hkj) 表示动态物体上的点点运动模型,Σq 为运动协方差,ms 为所有的运动因子的数量。被检测到的刚体 j 上的任意点的运动可以使用 (5) 表述为:
g(lk−1i,lki,k−10Hkj)=0lk−1i−k−10Rkj0lk−1i−k−10tkj+qsj(8)
其中 qs∼N(0,Σq) 为高斯噪声
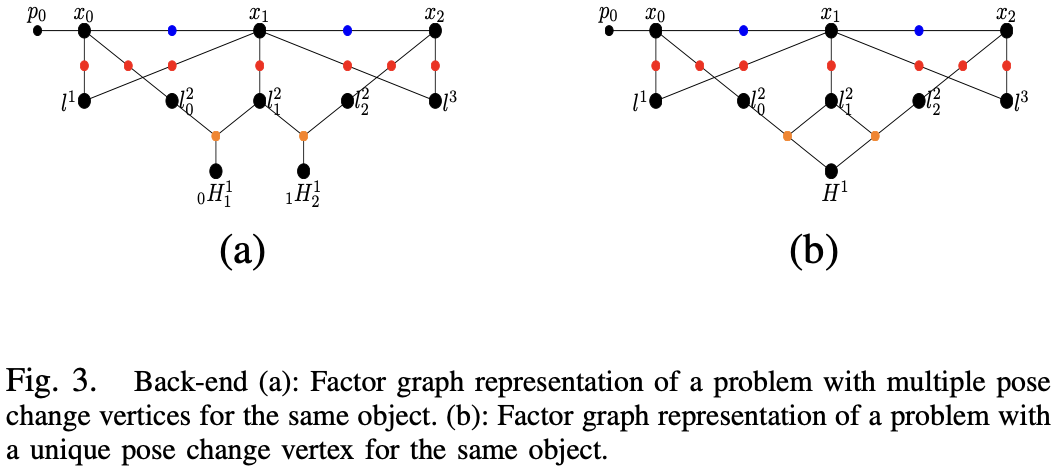
(8) 中的因子为三元因子(Fig.3 中橙色因子),成为刚体上点的运动模型。
2.4 The Fractor Graph
本文评估了使用/没使用恒定运动(constant motion)模型的场景:
- 城市场景:当物体的运动受到变化(加速、减速等)的影响时,运动建模是具有挑战性的。因此,允许在每个时间步上估计一个新的位姿变化。Fig.3a 为这种情况的因子图,途中使用两个运动顶点对两个不同的时间过渡估计同一物体的运动。一种约束是最小化这些运动估计之间的变化。
- 高速公路:每个物体(车辆)保持恒定运动,如 Fig.3b。
进一步,如果 body-fixed 坐标系的位姿变化是恒定的,那么参考坐标系的位姿变化也是恒定的。对于任意 k−1 和 k′−1,则:
k−1Lk−1Hk=C=k′−1Lk′−1Hk′∈SE(3)(9)
用 (9) 替换 (3) 得到 0Lk=0Lk−1C,且有 k−10Hk=0Lk−1C0Lk−1−1,则:
k−10Hk=0LkC0Lk−1=k0Hk+1(10)
这说明对于物体 j 和任意时间 k,k′,有 k−10Hkj=0Hj=k′0Hk′+1j∈SE(3)。
3 System Overview
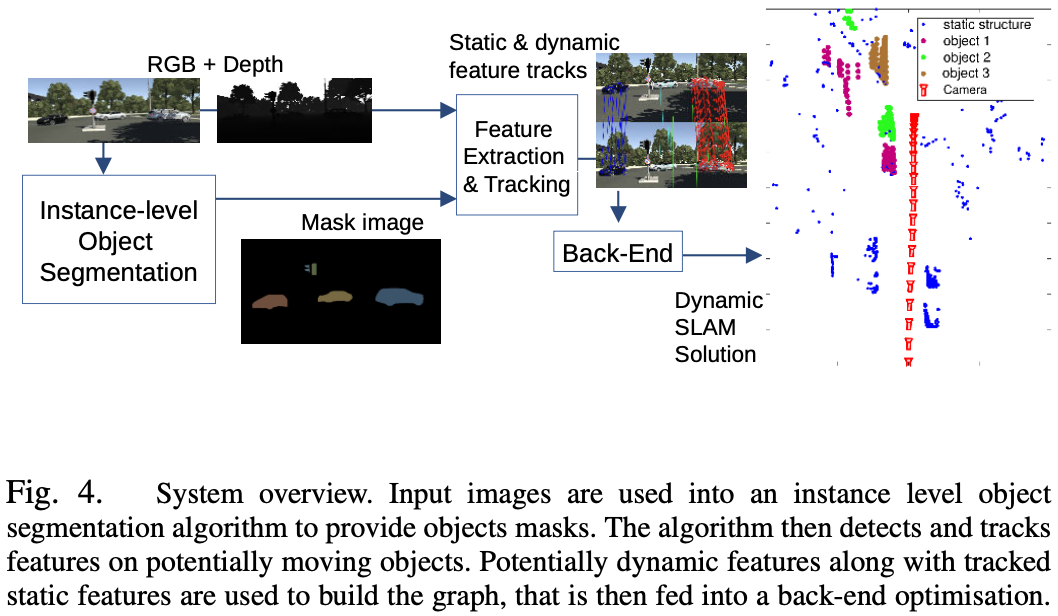
Fig.4 中设机器人携带 RGB-D 相机以及惯性传感器(里程计,IMU)。
为了保证运动物体上的特征被检测到,使用一个实例级的物体分割算法来产生物体掩码。前端利用物体掩码来检测潜在移动物体和静态背景上的特征。SLAM 前端通过目标分割和特征跟踪,识别和关联同一刚体对象上不同时间步的点。这些点共享一个基本的运动模型,利用这个模型来实现同步定位、映射和移动对象跟踪。
静态和动态三维测量以及本体感知传感器的测量被集成到后端,以同时估计摄像机运动、静态和动态结构以及场景中被检测对象的 SE(3) 位姿转换。
4 Experiments and Results
- 误差度量:
- 相对平移误差 RTE;
- 相对旋转误差 RRE;
- 相对结构误差 RSE(所有静态和动态结构 landmark 在预测和 GT 中的位置误差);
- 物体运动平移误差 OMTE,物体运动旋转误差 OMRE,物体运动速度误差 OMSE。
- 数据集 KITTI 上的评估:只对分割掩码达到一定比例的目标进行估计,确保排除了远处和部分观察到的进入/离开相机视野的物体。对于 vKITTI,阈值设置为 6%,对于 KITTI 设置为2%。
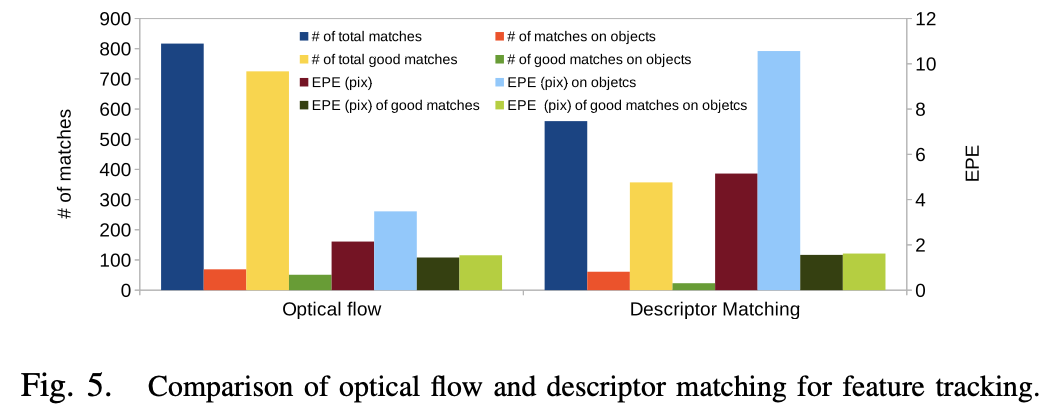
特征跟踪误差如 Fig.5,使用 PWC-Net 和特征描述子匹配,评价标准为 end-point error(EPE):
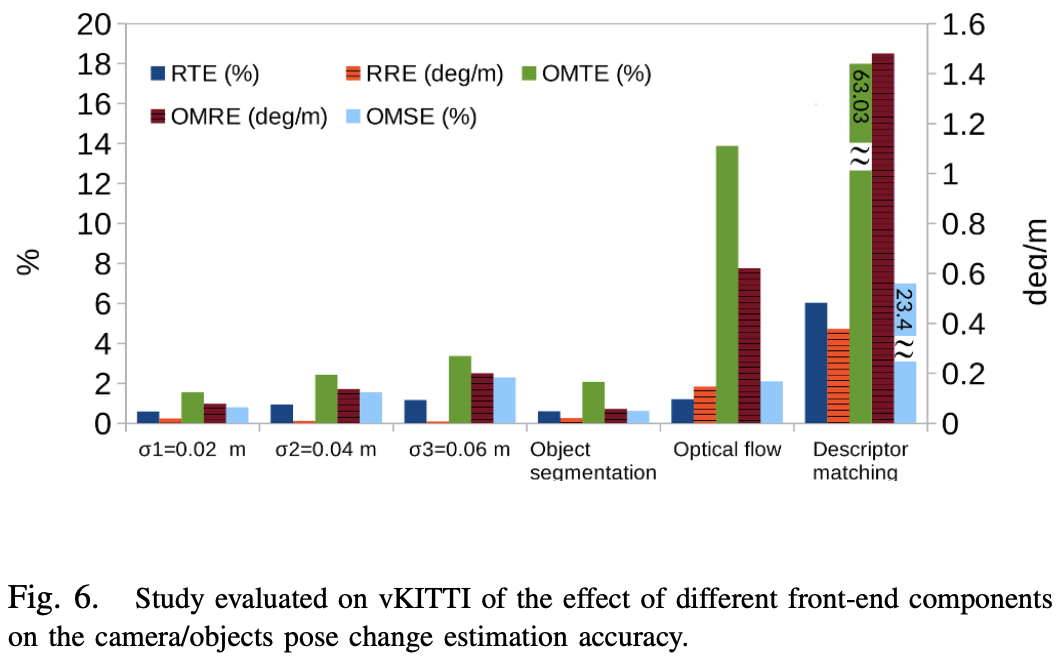
在观测的每个轴上分别添加 0 均值,标准差 σ1=0.02,σ2=0.04,σ3=0.06m 的高斯噪声,不同前端组件对相机位姿变换的预测准确率如 Fig.6:
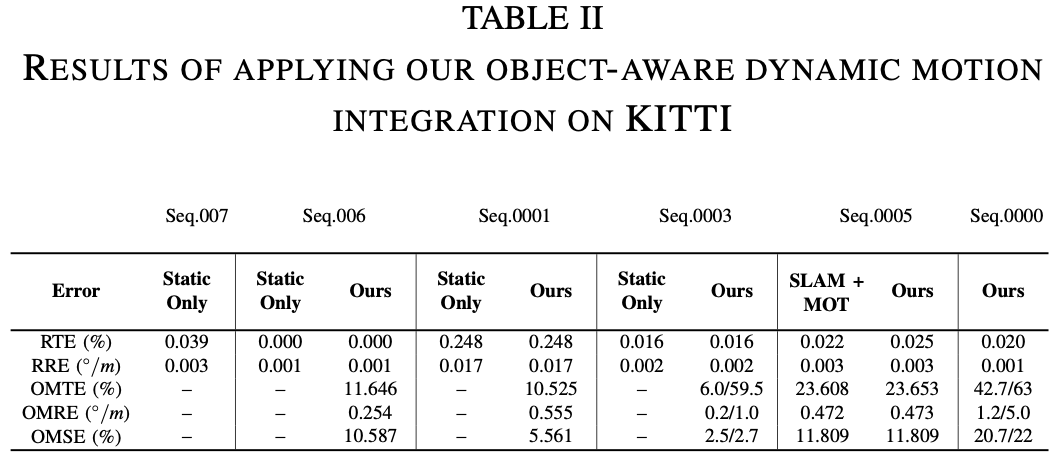
在 KITTI 上的实验结果如 Table II,Static Only 表示不考虑场景中的动态物体:
附录
为证明 (6) 等价于在 {0} 处观测到的从时间 k−1 到 k 物体位姿原点到平移,先进性如下的变换:
k−10Hk=0Lk−1k−1Lk−1Hk0Lk−1−1=0Lk0Lk−1−1(11)
设 0RLk−1∈SO(3) 和 0tLk−1∈R3 为 0Lk−1 中的旋转和平移,则 k−10Hk 的平移和旋转可以表示为 0tLk−0RLk0RLk−1⊤0tLk−1 和 RLk0RLk−1⊤。将这两个式子带入 (6) 得到:
v=0tLk−0RLk0RLk−1⊤0tLk−1−(I3−0RLk0RLk−1⊤)0tLk−1(12)
最后化简得 v=0tLk−0tLk−1。
参考
- [1] G. S. Chirikjian, R. Mahony, S. Ruan, and J. Trumpf, “Pose changes from a different point of view,” in Proceedings of the ASME International Design Engineering Technical Conferences (IDETC) 2017. ASME, 2017.