RP-VIO
对论文 RP-VIO: Robust Plane-based Visual-Inertial Odometry for Dynamic Environments (IROS, 2021) 的阅读整理。
论文情况
- 标题:RP-VIO: Robust Plane-based Visual-Inertial Odometry for Dynamic Environments
- 作者:Karnik Ram, Chaitanya Kharyal, Sudarshan S. Harithas, K. Madhava Krishna
- 会议:IROS, 2021
- 源码:https://github.com/karnikram/rp-vio
- 官网:https://rebrand.ly/rp-vio
1 Introduction
传统 VINS 的缺点:
- 除需要精确同步和校准的额外硬件,系统还需要执行足够的旋转和加速度运动,以保持重力和尺度可观测。
- VINS 还需要在线校准,退化轨迹可能使外部和内在偏差不可观察。
- 在具有多个独立动态对象的环境中的性能较差。
考虑绕过语义,直接识别场景中的静态结构以进行特征跟踪。注意到,平面是人造环境中最丰富的静态区域,且提供了一种简单的几何形状,可以进一步用来改进估计。基于这一思考,提出了 RP-VIO。RP-VIO 仅使用由平面分割模型识别的场景中一个或多个平面的特征,并使用平面诱导的单应矩阵进行运动估计。
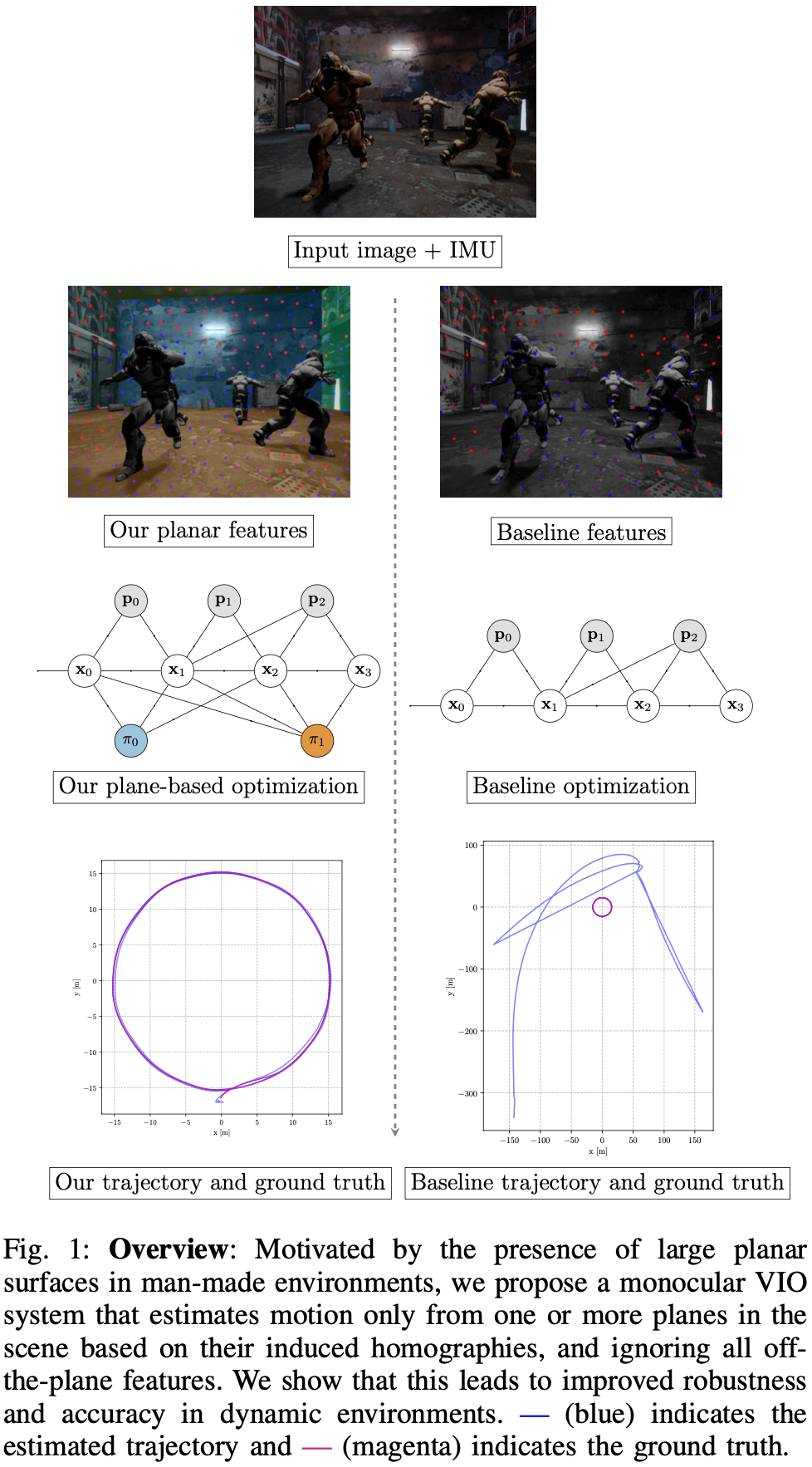
RP-VIO 的贡献如下:
- RP-VIO,一种单目 VIO 系统(基于 VINS- Mono),在初始化和滑动窗口估计期间仅使用平面特征及其诱导的单应性。
- 给出一个逼真的视觉惯性数据集,与现有数据集不同,它包含在整个序列中存在的动态物体,并具有足够的 IMU 数据。
2 Method
RP-VIO 基于 VINS-Mono 进行修改。认为 VINS-Mono 是一个纯粹的 VIO 系统,忽略其重定位和回环检测模块。在其前端基础上,仅检测和跟踪场景中的面特征,并将平面单应性约束引入其初始化和优化模块。
2.1 Definitions
表示世界坐标系,z 轴沿重力方向朝下; 表示自身坐标系,与 IMU 帧一致; 表示相机坐标系; 表示 时刻的自身、相机坐标系。
为从 到 的变换矩阵; 表示相对世界系的变换矩阵。
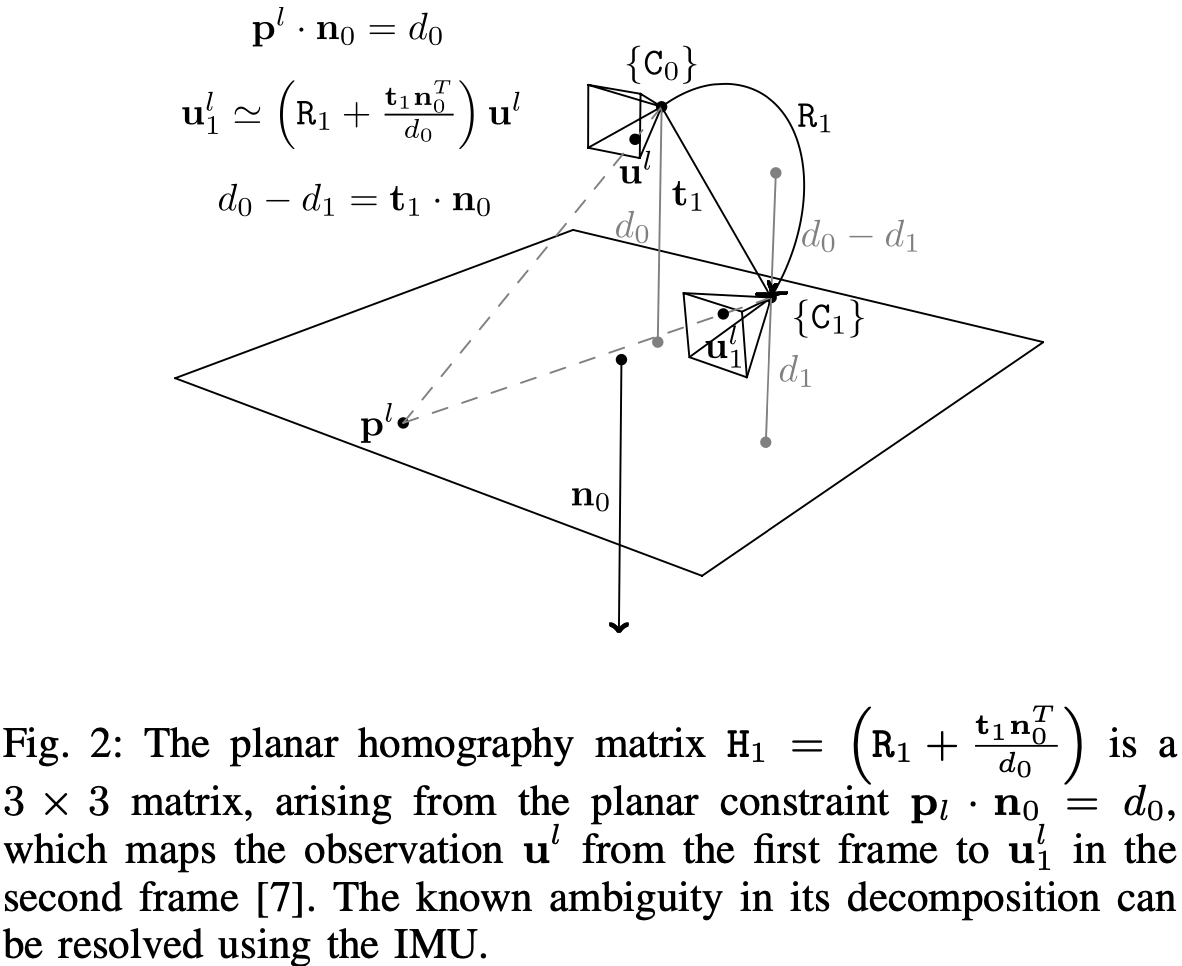
为第 个视觉特征的 2D 图像坐标,对应的 3D 坐标 则由相对于其被第一次观测到时所在帧的逆深度 表示。平面 表示为其相对于 帧的法向量和距离 。将平面点从 2D 图像坐标系 映射到 的平面单应性矩阵为 。单应性约束如图-2。
系统 时刻的状态 定义为 IMU 的位置、旋转、角速度、偏置、3D 点的逆深度和平面,即 。 表示所有在滑动窗口 的帧的状态,即 。
2.2 Front-End
系统将灰度图、IMU 测量和平面分割掩码作为输入。平面分割掩码是从基于 CNN 的模型中获得,在后面内容中介绍。将得到的平面分割掩码作用于原始图像,仅检测和跟踪场景中属于(静态)平面区域的特征,同时保持每个被跟踪特征所属平面的信息。
为了避免在掩码边缘检测到任何可能属于动态对象的特征,对原始掩码进行腐蚀操作。然后,使用 RANSAC 对每个平面的特征分别拟合一个平面单应性模型,以剔除离群点;这些异常值可能是 KLT 光流算法错误匹配产生的特征,也可能是不属于较大父平面的不准确的片段所产生的特征。将图像帧之间的原始 IMU 测量值转换为预积分测量值,选择视差足够大、特征轨迹足够长的图像帧作为关键帧。
2.3 Initialization
主要的视觉惯性滑动窗口优化是非凸的,迭代最小化需要精确的初始估计。为了在不对初始设置做任何假设的情况下获得良好的初始估计,使用了一个单独的松耦合初始化过程,其中视觉测量和惯性测量被单独处理为各自的姿态估计,然后对齐在一起,以在多个步骤中求解未知数。
从初始图像帧窗口中选择视差足够大的 2 帧;在所有匹配特征中,只选择来自场景中最大平面的特征,即具有最大特征数量的平面。利用这些特征和 RANSAC 拟合出两帧姿态与最大平面之间的平面单应矩阵 ,该单应矩阵被归一化。
然后使用 Malis 和 Vargas[1] 的解析方法分解为旋转、平移和平面法向量。
然而,该方法最多返回 4 个不同的解,这些解必须简化为一个。首先通过正深度约束将该解决方案集减少为 2,即所有平面特征必须位于相机的前面,( 为标准化图像坐标下的平均 2D 特征点)。对于剩下的 2 个解,选择转换到 系后旋转最接近对应 IMU 预积分的旋转 ,即:
尽管预积分的 IMU 旋转部分中陀螺仪偏差还没有估计,但其大小通常太小,不会造成解决方案的差异。
然后,使用分解得到的估计姿态对两帧之间的特征 3D 位置进行三角剖分,获得初始点云。使用 PnP 估计窗口内剩余帧相对于该点云的姿态。注意到,由于两帧之间的估计姿态在平面距离 的尺度内,三角化的点云和推导的姿态也在相同的尺度内。
然后将所有姿态估计输入到一个视觉 BA 求解器中,除了标准的 3D-2D 重投影残差外,还包括由平面单应性引起的 2D-2D 重投影残差:
该残差度量 帧中点 的期望观测值与真实观测值 之间的差异, 帧中点 是通过单应矩阵从第一帧中映射其对应的图像位置 得到的。图-2 也说明了这个过程。
BA 的输出是尺度为 的相机姿态、3D 特征点、平面法线。这个未知的尺度 ,以及初始化主要优化所需的剩余未知数,如重力向量、速度和 IMU 偏差,使用与 VINS-Mono[2] 中相同的分治方法进行估计。
对于场景中最大平面以外的平面,包括可能新观测到的平面,同样计算它们各自的平面单应矩阵并将其分解。但避免进行另一轮的 BA 操作且将其姿态与 IMU 测量重新对齐,以估计各自的尺度因子 。相反,将 直接估计为每个分解的平移量 与对应的度量平移量 (前面使用最大的平面和惯性测量进行了估计)的反比。这样,状态中的所有视觉和惯性量都已经解决了,这些估计值被输入到滑动窗口估计器中作为优化的初始值。
2.4 Sliding-window Optimization
定义 为滑动窗口 内两个连续帧之间的所有 IMU 测量;在帧 中观测到的所有平面特征定义为 ;所有观测到的平面为 。因子图如图-3 所示。
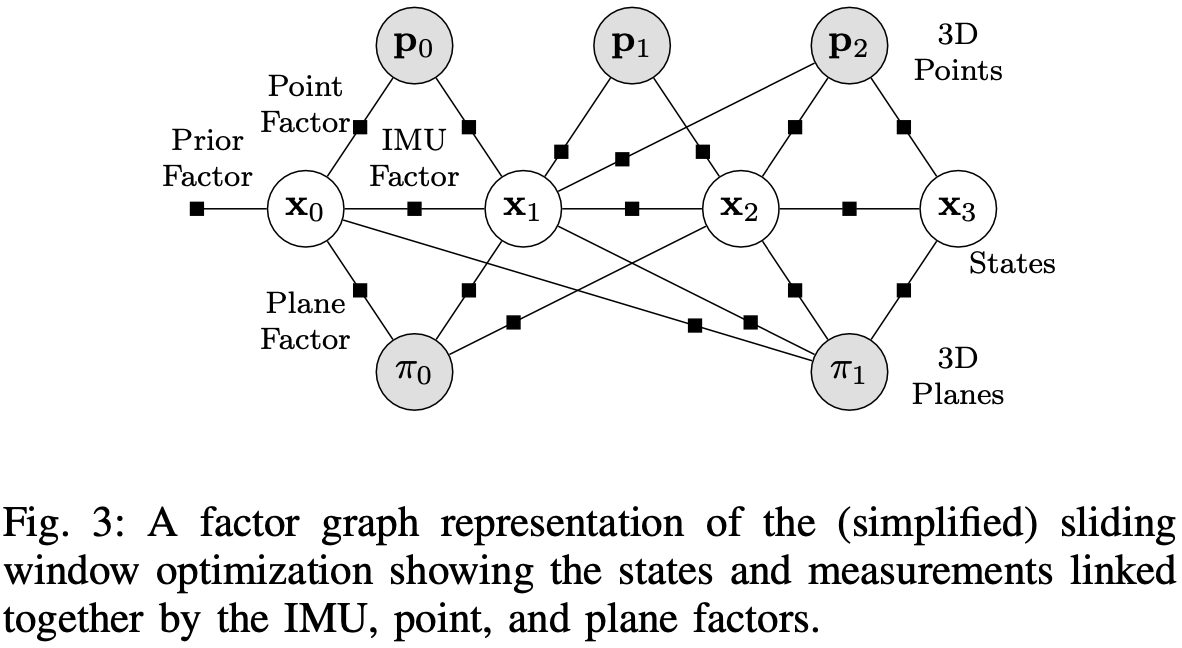
滑动窗口中的状态估计 由下式得到:
为先验残差,来自于前一状态的边缘化; 为预积分 IMU 残差; 为 VINS-Mono 中定义的 3D-2D 投影残差; 为柯西损失; 为平面单影损失,定义为:
第 个平面的法向量 和深度 在 中被最初定义,并通过 (5) 转换到 :
整个非线性目标函数使用 Ceres Solver 中的 Dogleg 算法和 Dense-Schur 线性求解器迭代最小化。
在优化结束时,窗口向前移动一帧以合并最新一帧。通过传播前一帧的惯性测量值来初始化最新一帧的状态。
2.5 Plane Segmentation
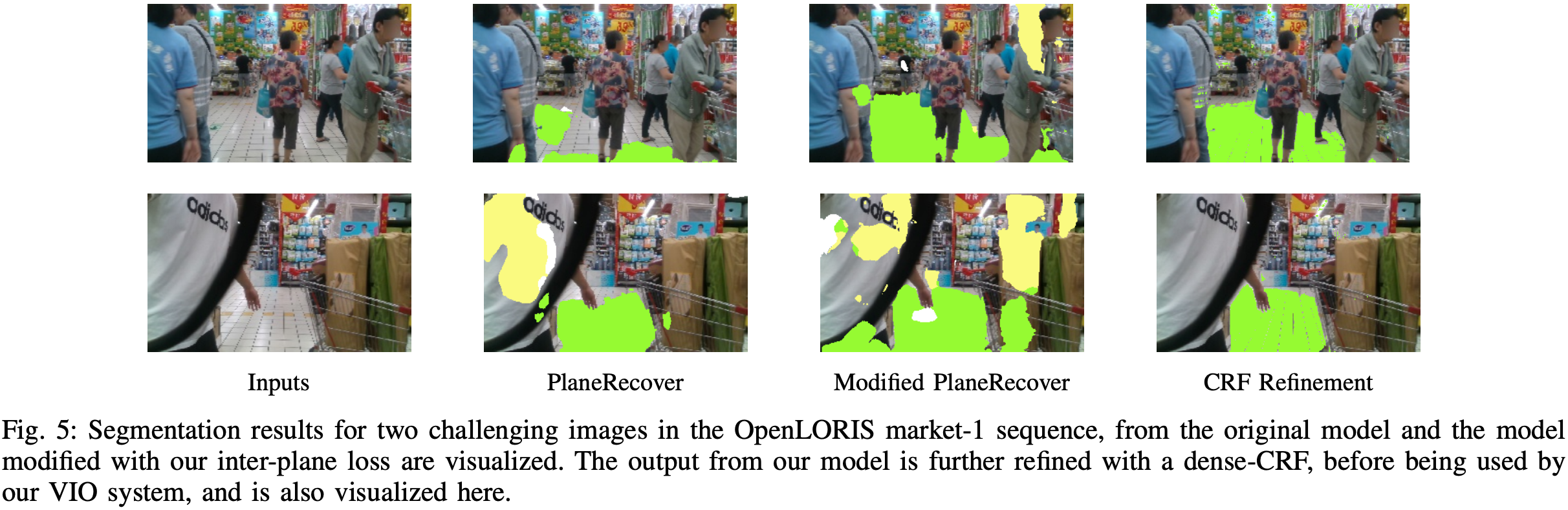
为了从每个输入的 RGB 图像中分割出平面,使用 Plane-Recover[3] 模型。模型同时预测平面分割掩码及其 3D 参数。该模型在单个 Nvidia GTX Titan X (Maxwell) GPU 上以 30 FPS 的速度运行。
在实验中注意到,预测的分割通常是不连续的,且单个大平面被分割为多个独立的平面。为克服这一问题,引入了一个额外的平面间损失函数,将具有较小相对方向的平面约束为单个平面:
为平面法向量, 为平面总数(固定为 3), 为一批次中的图像数, 为生成的平面间标签,如果 则为 1,否则为 0。
用 SYNTHIA 提供的训练数据、室内 ScanNet 数据集的两个额外序列 (00,01) 上进行训练。图-5 为真实世界的分割结果。
3 Experiments
- 硬件:i5-8400 6 核,8 GB RAM,1 TB HDD
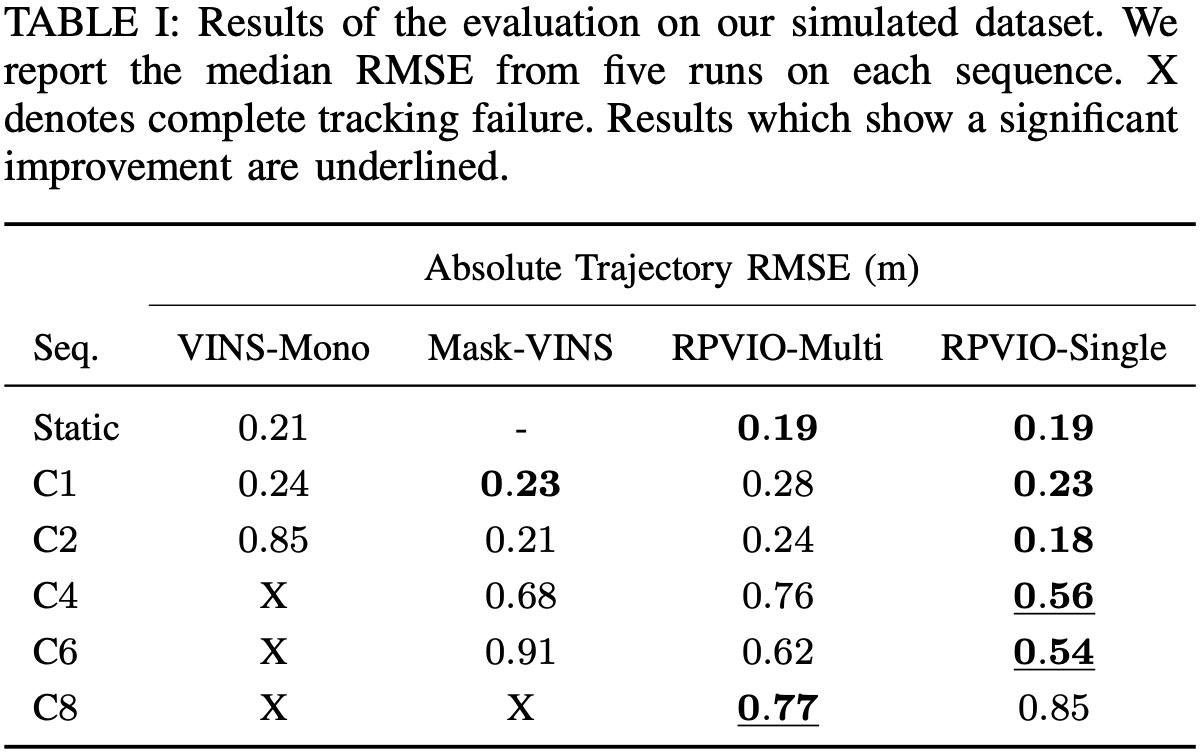
3.1 Simulation Experiments
- RPVIO-Sim Dataset:在虚幻引擎中构建了一个具有动态物体的室内仓库环境。环境与 AirSim 集成,以生成四旋翼飞行器并收集视觉惯性数据。收集了 20 Hz 的单目 RGB 图像及其平面实例掩码,IMU 测量值和 1000 Hz 的真实姿态。IMU 测量值被次采样到 200hz。由记录过程的时间偏移使用 Kalibr 进行校准。
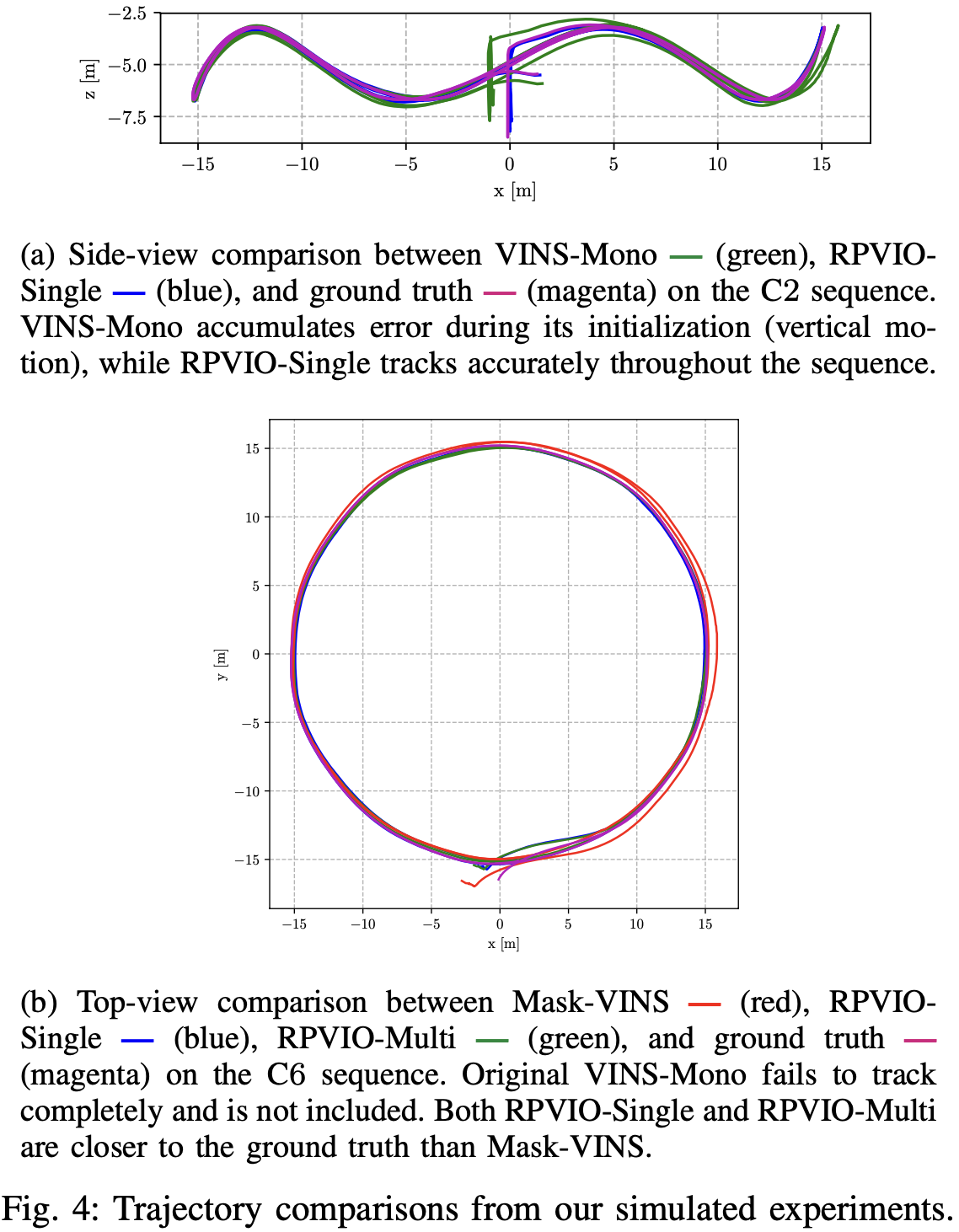
使用了方法的两个版本:RPVIO-Single 和 RPVIO-Multi。RPVIO- Single 在优化中只包含最大可见平面的特征,而 RPVIO- Multi 包含所有可见平面的特征。
还创建了另一个版本的 VINS-Mono,称为 Mask-VINS,经过修改以接受相同的平面实例掩码作为额外的输入。后端保持与VINS-Mono相同。
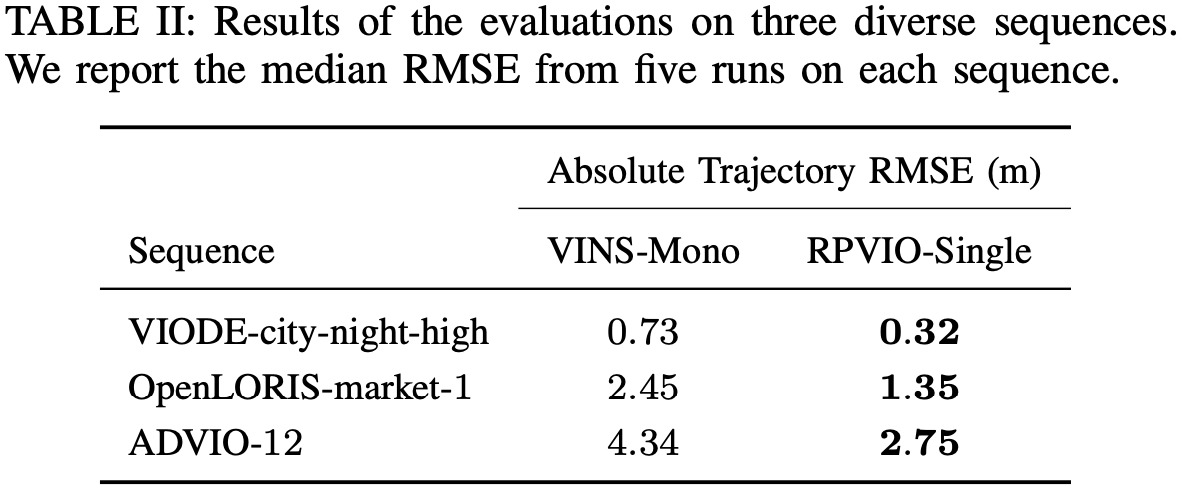
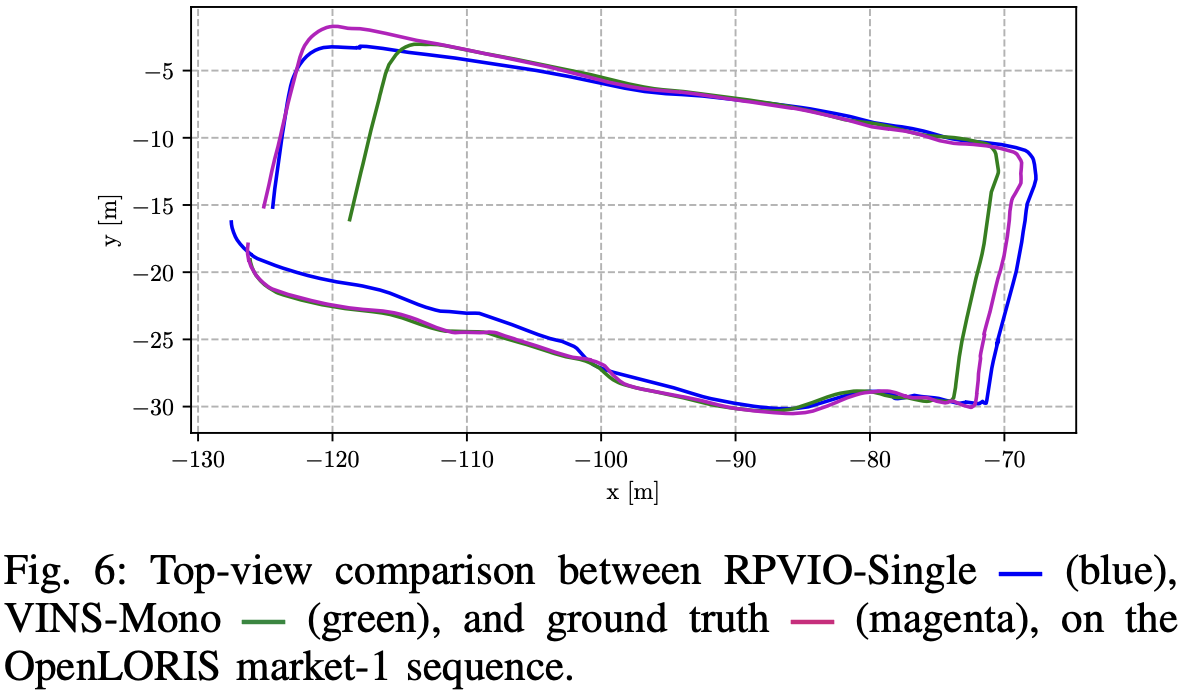
3.2 Experiments on Standard Datasets
参考文献
- [1] E. Malis and M. Vargas, “Deeper understanding of the homography decomposition for vision-based control,” INRIA, Tech. Rep. inria- 00174036, 2007.
- [2] T. Qin, P. Li, and S. Shen, “VINS-Mono: A robust and versatile monocular Visual-Inertial state estimator,” IEEE Trans. Rob., vol. 34, no. 4, pp. 1004–1020, Aug. 2018.
- [3] F. Yang and Z. Zhou, “Recovering 3d planes from a single image via convolutional neural networks,” in Proceedings of the European Conference on Computer Vision (ECCV), 2018, pp. 85–100.