在一个实数向量空间 V 中,对于给定集合 X,所有包含 X 的凸集的交集 S 被称为 X 的凸包。X 的凸包可以用 X 内所有点 (x1,x2,...,xn) 的线性组合来构造。在二维欧氏空间中,凸包可以想象为一条刚好包括所有点的橡皮圈。
以不严谨的语言来描述,给定二维平面上的点集,凸包就是将最外层的点连接起来构成的凸多边形,它能包含点集中的所有点。如图-1,假设平面共有 p0∼p12 共 13 个点,过某些点作一个多边形,使这个多边形能把所有点都“包”起来。当这个多边形是凸多边形的时候,就叫它“凸包”。
凸包算法
1 概念
在一个实数向量空间 V 中,对于给定集合 X,所有包含 X 的凸集的交集 S 被称为 X 的凸包。X 的凸包可以用 X 内所有点 (x1,x2,...,xn) 的线性组合来构造。在二维欧氏空间中,凸包可以想象为一条刚好包括所有点的橡皮圈。
以不严谨的语言来描述,给定二维平面上的点集,凸包就是将最外层的点连接起来构成的凸多边形,它能包含点集中的所有点。如图-1,假设平面共有 p0∼p12 共 13 个点,过某些点作一个多边形,使这个多边形能把所有点都“包”起来。当这个多边形是凸多边形的时候,就叫它“凸包”。
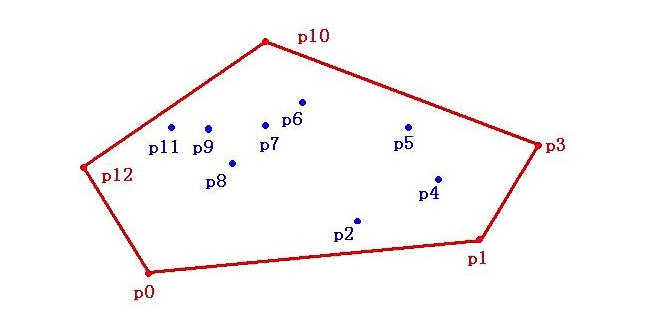
图-1 凸包示意
2 解法一(Graham 扫描法)
- 时间复杂度:O(nlogn)
2.1 计算步骤
Graham 扫描的思想是先找到凸包上的一个点,然后从那个点开始按逆时针方向逐个找凸包上的点,实际上就是进行极角排序,然后对其查询使用。 以图-2 为例,Graham 扫描法计算步骤为:
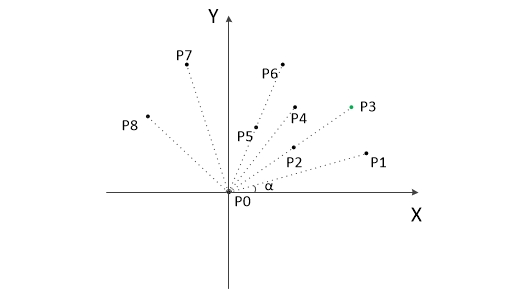
图-2 Graham扫描初始图
- 把所有点放在二维坐标系中,则纵坐标最小的点一定是凸包上的点,如图-2 中 P0。
- 将所有点的坐标平移,使 P0 作为原点。
- 计算各个点相对于 P0 的幅角 α ,按从小到大的顺序对各个点排序。当 α 相同时,距离 P0 比较近的排在前面。如图-2 得到的结果为 P1,P2,P3,P4,P5,P6,P7,P8。由几何知识可以知道,结果中第一个点 P1 和最后一个点 P8 一定是凸包上的点。以上,已经知道了凸包上的第一个点 P0 和第二个点 P1,把它们放在栈 S 里。把 P2 压入栈 S,假设 S 的栈底元素为 S[0],栈顶元素为 S[t]。
- 对 i 遍历 3 到 8(所有点的最大下标):
- 连接 S[t−1] 和 S[t] 得向量 v1,连接 S[t−1] 和 Pi 得向量 v2。
- 若 v2 的方向相对于 v1 为左转,则把 Pi 压入 S,继续步骤 4,否则进入步骤 7。
- S[t] 不满足凸包要求,把 S[t] 弹出,继续步骤 5。
最后,栈中的元素就是凸包上的点。计算的动态过程如图-3。
图-3 Graham扫描法计算过程
2.2 算法
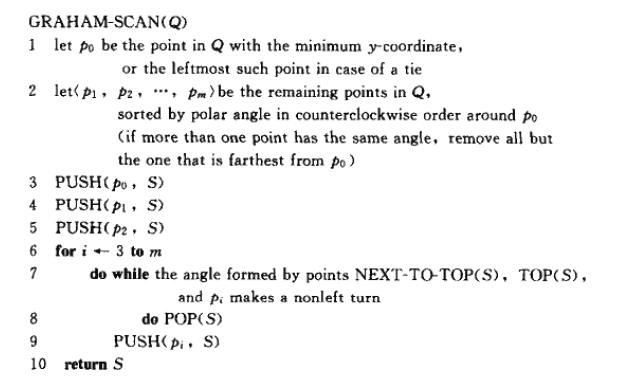
图-4 Graham扫描法算法
2.3 CPP 代码
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
| #include <iostream>
#include <vector>
#include <cmath>
using namespace std;
class mpoint {
public:
double x;
double y;
mpoint(double xx = 0, double yy = 0) {
x = xx;
y = yy;
}
};
int get_miny_point_id(mpoint *points, int size) {
int min_id = 0;
double miny = 10000;
for (int i = 0; i < size; i++) {
if (points[i].y < miny) {
miny = points[i].y;
min_id = i;
}
}
return min_id;
}
void get_cos(mpoint *points, double *mcos, int id, int size) {
double coss;
for (int i = 0; i < size; i++) {
if (i == id) {
mcos[i] = 2;
} else {
coss = (points[i].x - points[id].x) / sqrt((points[i].x - points[id].x) * (points[i].x - points[id].x) + (points[i].y - points[id].y) * (points[i].y - points[id].y));
mcos[i] = coss;
}
}
}
void sort_points(mpoint *points, double *mcos, int size) {
int i, j;
double temp_cos;
mpoint temp_point;
for (i = 0; i < size; i++) {
for (j = 0; j < size - i - 1; j++) {
if (mcos[j] < mcos[j + 1]) {
temp_cos = mcos[j];
mcos[j] = mcos[j + 1];
mcos[j + 1] = temp_cos;
temp_point = points[j];
points[j] = points[j + 1];
points[j + 1] = temp_point;
}
}
}
}
int ccw(mpoint a, mpoint b, mpoint c) {
double area = (b.x-a.x) * (c.y-a.y) - (b.y-a.y) * (c.x-a.x);
if (area < 0) {
return -1;
} else {
if (area > 0) return 1;
else return 0;
}
}
void get_outpoint(mpoint *points, int size) {
vector<mpoint> outpoint;
outpoint.push_back(points[0]);
outpoint.push_back(points[1]);
int i = 2;
while (i != size) {
if (ccw(outpoint[outpoint.size() - 2], outpoint[outpoint.size() - 1], points[i]) > 0) {
outpoint.push_back(points[i]);
i = i + 1;
} else {
outpoint.pop_back();
}
}
cout << "The outpoints are: " << endl;
for (int k = 0; k < outpoint.size(); k++) {
cout << outpoint[k].x << " " << outpoint[k].y << endl;
}
}
int main() {
int size = 4;
double px, py;
cout << "Please input the size: ";
cin >> size;
mpoint *points;
int miny_point_id;
double *mcos;
points = new mpoint[size];
mcos = new double[size];
for (int i = 0; i < size; i++) {
cin >> px;
cin >> py;
points[i].x = px;
points[i].y = py;
}
miny_point_id = get_miny_point_id(points, size);
get_cos(points, mcos, miny_point_id, size);
sort_points(points, mcos, size);
get_outpoint(points, size);
}
|
2.4 左转的判断
对于前面的 v2 相对 v1 是左转还是右转,计算方式可以使用叉乘:
v1×v2=[x1y1x2y2]=x1y2−x2y1
若值为正,则 v1 在 v2 的右侧(顺时针方向),若为负则 v1 在 v2 的左侧(逆时针方向)。
3 解法二(Javis-March 算法或 Gift Wrapping 算法)
- 时间复杂度:O(NM),N 为点的数量,M 为凸包的顶点数。
3.1 计算步骤
- 先确定凸包边界上的点 p1 和与下一个点 p2(可以利用 Graham 扫描法中的方法);
- 在点集里去寻找下一个点 p3,使得 p1,p3,p2 满足 CCW(Counterclockwise,以逆时针方向旋转);
- 如果满足,这就说明 p3 是更外围的点,把 p3 的值覆盖 p2,即 p2=p3;
- 重复第 3 步,直到所有点都访问过,即为找到了下一个最外边的点;
- 将 p2 的值覆盖 p1,即 p1=p2;
- 重复第 2 步,直到下一个点回到起点。
3.2 CPP 代码
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
| typedef vector<pair<double, double>> vpdd;
typedef pair<double, double> pdd;
bool ccw(pdd a, pdd b, pdd c) {
return ((c.first - a.first) * (b.second - a.second) - (c.second - a.second) * (b.first - a.first)) < 0;
}
void jarvis_march(const vpdd &input) {
int n = input.size();
int left = 0;
for (int i = 0; i < n; i++) {
if (input[i].first < input[left].first) {
left = i;
}
}
int first_point = left;
int third_point;
do {
hull_jmarch.push_back(input[first_point]);
third_point = (first_point + 1) % n;
for (int i = 0; i < n; i++) {
if (ccw(input[first_point], input[i], input[third_point])) {
third_point = i;
}
}
first_point = third_point;
} while (first_point != left);
}
|
参考