对极几何(Epipolar Geometry)是 Structure from Motion 问题中,在两个相机位置产生的两幅图像之间存在的一种特殊几何关系,是 SfM 问题中 2D-2D 求解两帧间相机姿态的基本模型。
本文结合网络资源对对极几何进行整理。
Epipolar Gemotry
1 基本概念
对极几何(Epipolar Geometry)是 Structure from Motion 问题中,在两个相机位置产生的两幅图像之间存在的一种特殊几何关系,是 SfM 问题中 2D-2D 求解两帧间相机姿态的基本模型。
2 基本模型
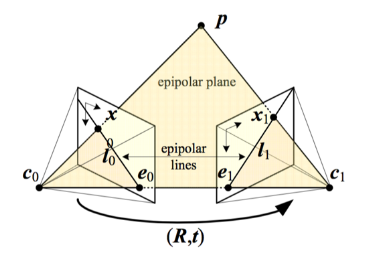
图中 c0,c1 为两个相机中心,p 为空间中一点,p 在 c0,c1 对应的像平面上的投影分别为 x0,x1。c0,c1 连线与像平面的交点 e0,e1 为极点(epipole),l0,l1 为极线(epipolar line),c0,c1,p 三点组成的平面称为极平面(epipolar plane)。
3 对极约束
根据针孔相机模型,相机成像平面一点的像素坐标 p 和该点在世界坐标系下的 3D 坐标 P 有 p=KP 的关系,使用齐次坐标则有:
dp=KP(3.1)
其中 d 为点深度,K 为内参矩阵,p 为齐次坐标。
以第一个相机的坐标系为参照,对于两个相机则有:
d0p0=K0P, d1p1=K1(RP+t)(3.2)
令 x=K−1p,则上式可以归一化为:
d0x0=P, d1x1=RP+t(3.3)
由这两式得:
⇒⇒⇒⇒d1x1=R(d0x0)+tt×d1x1=t×Rd0x0+t×t (叉乘 t)t×d1x1=t×Rd0x0x1T(t×d1x1)=x1T(t×Rd0x0)d1x1Tt∧x1=d0x1Tt∧Rx0(3.4)
由于等号左边左乘 x1T 为乘了一个与自身(t∧x1)垂直的向量,因此等于 0,故而:
x1Tt×Rx0=x1Tt∧Rx0=0(3.5)
上式即为对极约束。
对极约束的几何意义:
- x1,t,Rx0 三者的混合积为 0,即三个向量共勉,即上图中三角形的三边共面。
4 本质矩阵
令 E=t×R=t∧R,得到对极约束的新形式:
x1TEx0=0(4.1)
E 称为本质矩阵(Essential Matrix),由外参 R 和 t 决定。
本质矩阵的几何意义:
- x1Tl1=0,即 x1 在直线 l1=Ex0 上,表示 E 将 x0 投影到另一幅图像中的直线 l1 上。
5 基本矩阵
引入相机内参矩阵,将像点映射到像素平面:
{p0=K0x0p1=K1x1(5.1)
带入本质矩阵的 (4.1) 式可得:
p1TK1−TEK0−1p0=0(5.2)
令 F=K1−TEK0−1,上式变为:
p1TFp0=0(5.3)
F 称为基本矩阵(Fundamental Matrix),表示了同一 3D 点在两个相机像素平面上像素点之间的几何约束关系。
本征矩阵与基本矩阵表征了两个透视模型对极几何的代数特征,以上 (4.1) 和 (5.2) 二式共同构成对极约束(Epipolar Constraint)。
参考