TSDF & Marching Cube
TSDF(基于截断的带符号距离函数)算法,是一种在 3D 重建中计算 iso-surface 的方法。在拥有大内存的显卡并行计算的情况下,可以做到实时重建的效果。
MC 是 W.Lorensen 等人于 1987 年提出来的一种体素级重建方法。MC 算法也被称为“等值面提取”(Iso-surface Extraction)算法。
本文是关于 TSDF 和 Marching Cube 相关网络资料的理论整理。
1 TSDF(Truncated Signed Distance Function)
1.1 简介
TSDF(基于截断的带符号距离函数)算法,是一种在 3D 重建中计算 iso-surface 的方法。在拥有大内存的显卡并行计算的情况下,可以做到实时重建的效果。
1.2 算法思路
用一个大空间(volume),这个空间可以完全包括要建立的 3D 模型,volume 由许多 voxel 构成:
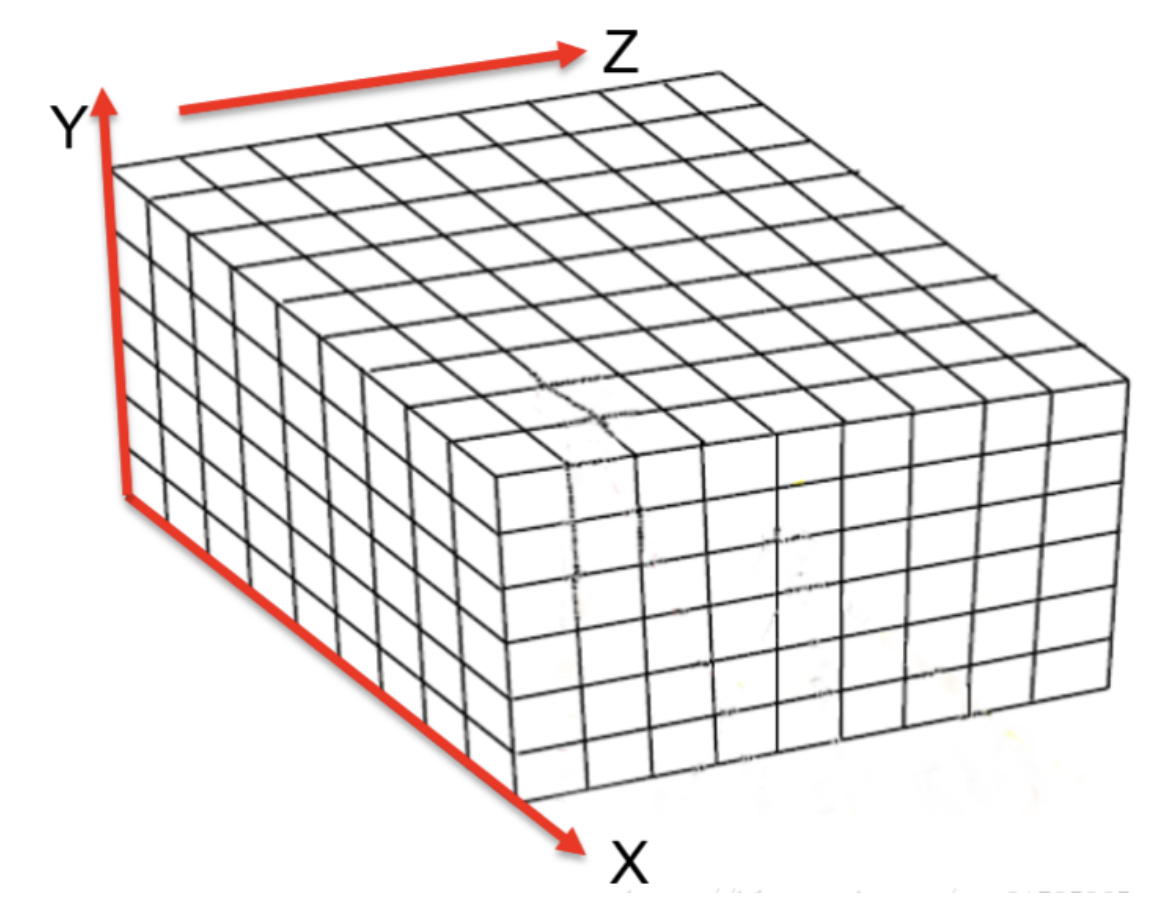
对每个 voxel(记为 )对应空间中的一个点,这个点用两个量来评价:
- 该 voxel 到最近的 surface(一开始不知道,设为没有)的距离,记为 ,即带符号距离;
- 体素更新时的权重,记为 。
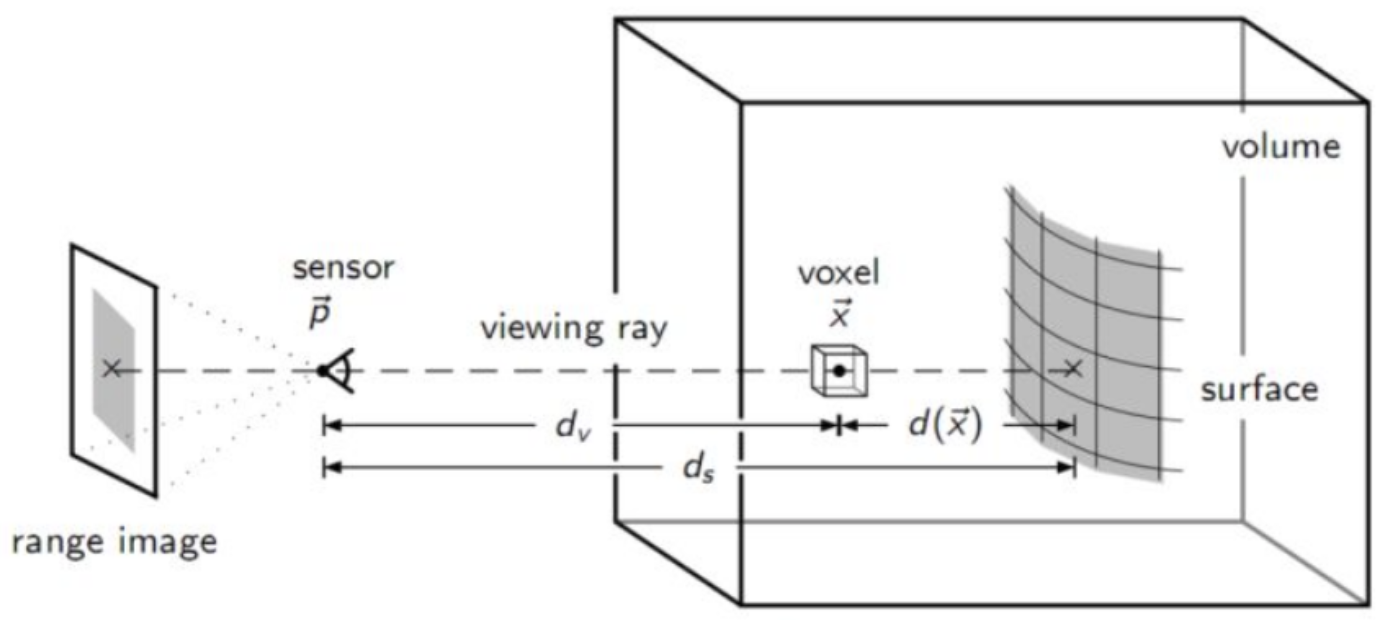
假设真实的平面到相机的深度为 ,相机采集到的深度为 ,那么符号距离就是
当 ,说明体素在真实面的前面,否则在真实面后面。每次相机采集的数据都认为是最大可能的真实面,也有可能在数据的前后,但是概率要小。这个前后距离可以进行一定限制,如果距离特别远,那么概率会很小,就可以忽略。
1.3 算法步骤
-
准备:
- 建立 volume,能够包围要重建的物体;
- 划分 voxel,其大小取决于 voxel 数目和 volume 的划分;
- 对于每个 voxel,转化其为世界坐标系下的 3D 位置点 。
-
遍历所有 voxel,计算 TSDF 值和权重:
-
由深度数据的相机位姿矩阵,求世界坐标系下点 在相机坐标系下的映射点 ,并由内参矩阵反投影 求深度图像中对应的像素点 , 的深度值记为 ,点 到相机坐标原点点距离为 ;
-
的 SDF 值为 ,设截断距离为 ,则有
-
计算权重:
其中 为投影光线与 surface 法向量的夹角。
-
-
当前帧与全局融合结果进行融合。
如果当前帧是第一帧,则第一帧为融合结果;否则需要当前帧与之前的融合结果进行再融合。以 为融合 TSDF 值, 为融合权重, 为当前帧的 TSDF 值, 为当前帧的权重值,则更新公式如下:
每添加一帧深度数据,就执行一遍 2,3 步,直到最后输出结果,给 Marching Cube 计算三角面。
1.4 参考
- https://blog.csdn.net/zfjBIT/article/details/104648505
- https://jijianshu.com/p/fc53c02e9c76
- https://www.guyuehome.com/15664
- https://blog.csdn.net/u011426016/article/details/103239696(源码解析)
2 Marching Cubes Algorithm
2.1 等值面(iso-surface)
等值面是空间中的一个曲面,规定空间中每一个点都有一个属性值,属性值相等的连续空间组成的曲面,称之为等值面。
在采集深度点云时,由于传感器自身精度以及配准的误差在一个地方会采集到很多点,可以认为是对空间连续点的采样,而且点的位置会有很大的波动。通过一些其他方法可以得出这些点与真正的面的差值。那么真正的面在哪?
假如一个点在面的前方,标记为 ,一个点在真实面的后方,标记为 ,可以认为这个真正的面就在这两个点的中间。
还可以这么认为,空间内真正的面会产生一个场,场内有无数个等值面,这个值暂且称之为空间场值,空间场值在面的前方为正值,后方为负值。离真实面越近,空间场值的绝对值越小,真实面的空间场值为 。目的就是在对这个场进行采样后,找到空间内真正的面。
2.2 Marching Cube(MC)算法简介
MC 是 W.Lorensen 等人于 1987 年提出来的一种体素级重建方法。MC 算法也被称为“等值面提取”(Iso-surface Extraction)算法。
2.3 算法思路
Marching Cube 首先将空间分成众多的六面体 cube,类似将空间分成很多的小块。然后找到等值面经过的 cube,如下图:
求出该 cube 的边与 0 等值面(0 等值面就是空间场值为 0 的等值面)的交点,将这些交点按照一定的拓扑连接关系连接起来,作为 0 等值面在该 cube 中的近似表示。注意是近似表示,采用三角形。
2.3.1 如何找到等值面经过的六面体网格
前面提到,有很多的已知采样点,并且知道这些点在空间中的空间场值,现在我们将空间分为很多个小格子,每个小格子都有 8 个顶点,通过计算 8 个顶点周围(范围与 cube 的大小相关)的采样点,近似计算出 8 个顶点的空间场值(加权平均等方法)。可以对 cube 做以下分类:
- 8 个顶点都没有空间场值,0 等值面不经过或者经过但是没有采样,没有办法进行近似,所以不处理。
- 8 个顶点都有或部分有空间场值,当空间场值都是正值或者都是负值时,说明 0 等值面不在 cube 内。
- 当 cube 的顶点的空间场值有正有负时,则说明有 0 等直面穿过 cube。则需要从众多 cube 内,筛选出这样的 cube。
2.3.2 怎么求 cube 边与 0 等值面的交点
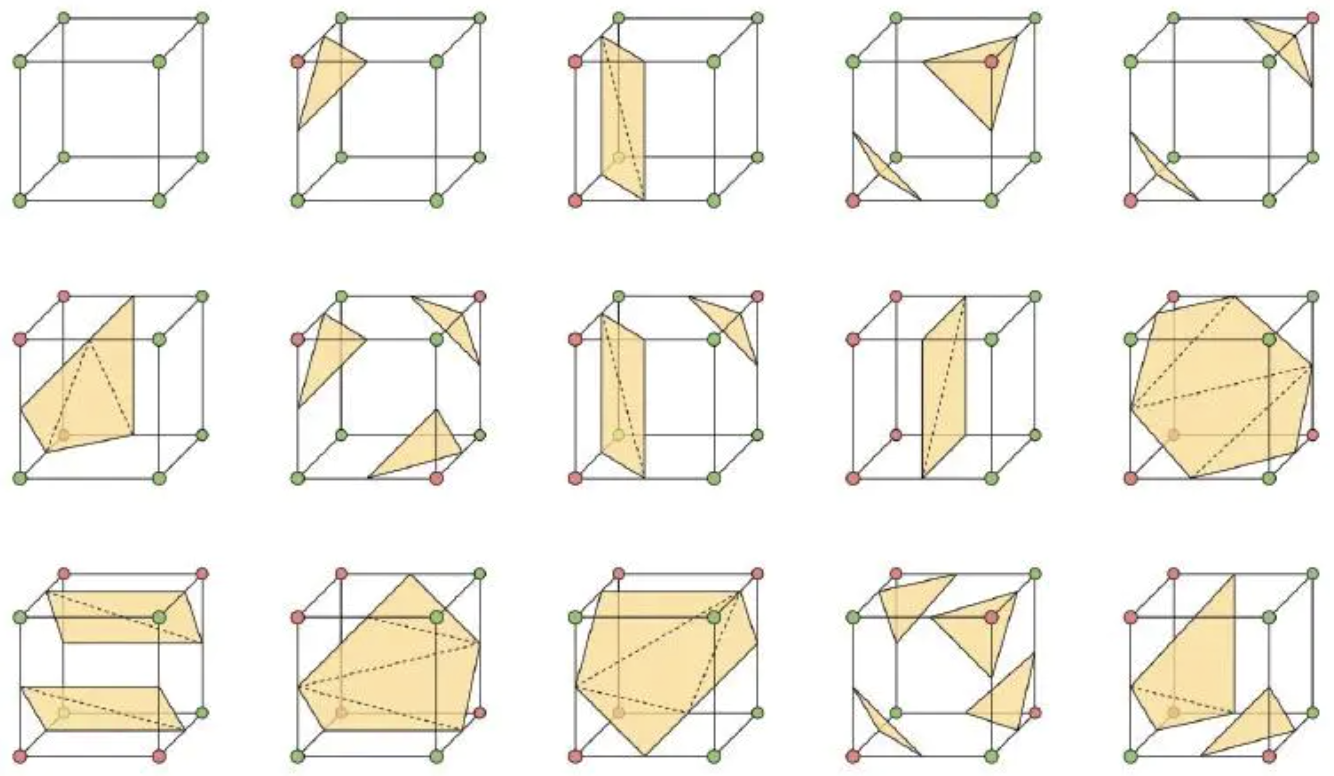
因为 cube 有 8 个顶点,8 个顶点的状态就有 种,但是由于 cube 具有对称性,通过对称性,可以简化这些状态至 15 种状态:
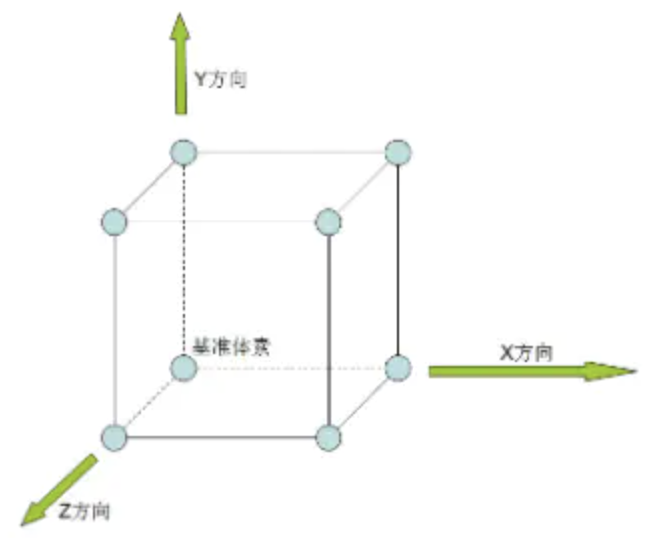
现在需要精算出来这个交点的具体的位置,举一个例子,先给 cube 的所有的顶点和边标记:
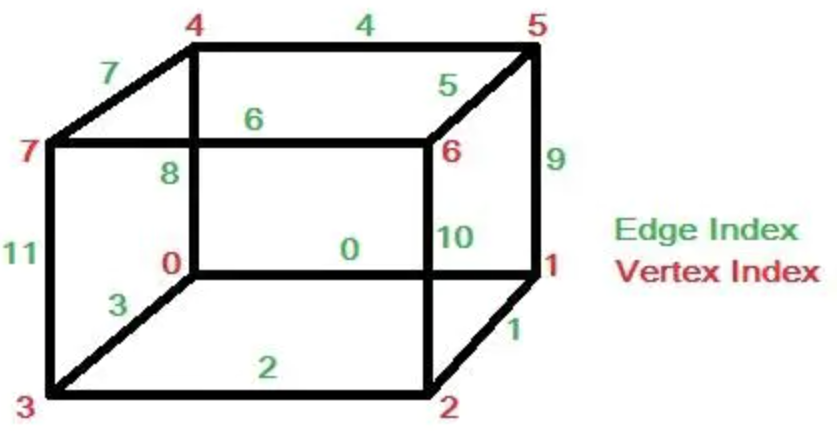
假如体素下方的顶点 3 的值小于等值面值,其他顶点上的值都大于等值面值,那么可以生成一个与体素边 2,3,11 相交的三角面片,而三角面片顶点的具体位置则需要根据等值面值和边顶点 3-2,3-0,3-7 的值线性插值计算得到。
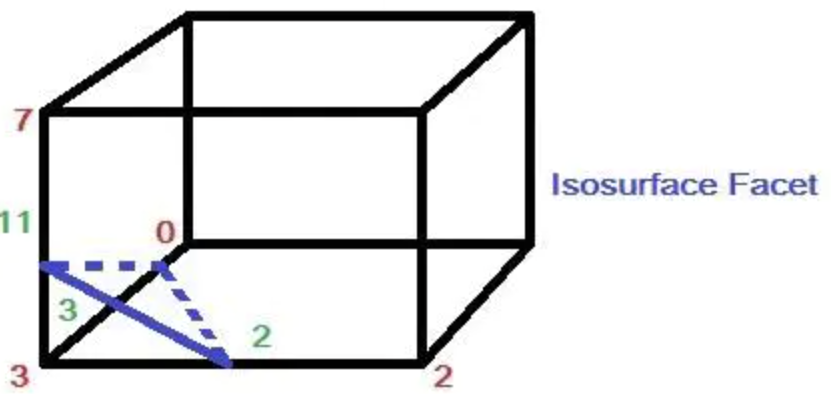
将交点坐标用 表示,、 代表边上两个端点的坐标,、 代表这两个端点上的值, 代表等值面值,那么交点坐标的计算公式如下(线性插值,也可以是其他方法):
那么现在对所有的含有等值面的 cube 计算出了其与等值面的交点。最后一步,就是将这些交点连接成三角形。
2.3.3 这些交点按照怎么的拓扑连接关系连接,是怎么操作的?
连接三角形的拓扑结构,也在前面 15 中情况中,都画了出来,只要按照上图的表中已经记录好的连接关系,就可以将三角形连接出来。
2.4 算法流程
-
将原始数据经过预处理之后,读入特定的数组或者八叉树中。
-
从 volume 中提取一个 cube,成为当前 cube 同时获取该 cube 的所有信息,例如 8 个顶点的值,坐标位置等。
-
将当前 cube 的 8 个顶点的函数值与给定等值面值 C 进行比较,得到该 cube 的状态表。
-
根据当前 cube 的状态表索引,找出与等值面相交的 cube 棱边,并采用线性插值的方法计算出各个交点的位置坐标。
-
利用中心差分法,求出当前 cube 的 8 个顶点的法向量,采用线性插值的方法,得到三角面各个顶点的法向量。
-
根据各个三角面顶点的坐标、顶点法向量进行三角面的连接。